MazeRunner
MazeRunner
Research
Research
The Maze Runner project stemmed from a high school culminating project to propose a versatile robotics project suitable for classroom kits. The research phase involved:
Identifying Capabilities:
Analyzed robotics projects suitable for educational purposes, focusing on features like maze solving, line following, and obstacle avoidance.
Ensured the project aligned with curriculum goals to teach programming, electronics, and mechanical design.
Component Selection:
Chose an Arduino UNO Rev3 for its wide accessibility and ease of programming.
Evaluated stepper motors for precision, ultrasonic sensors for obstacle detection, and a light sensor for line following.
Manufacturing Feasibility:
Assessed the viability of using 3D-printed components for cost efficiency and customization.
Selected Carbon Fiber PLA for its lightweight yet durable properties, ensuring longevity in an educational setting.
The Maze Runner project stemmed from a high school culminating project to propose a versatile robotics project suitable for classroom kits. The research phase involved:
Identifying Capabilities:
Analyzed robotics projects suitable for educational purposes, focusing on features like maze solving, line following, and obstacle avoidance.
Ensured the project aligned with curriculum goals to teach programming, electronics, and mechanical design.
Component Selection:
Chose an Arduino UNO Rev3 for its wide accessibility and ease of programming.
Evaluated stepper motors for precision, ultrasonic sensors for obstacle detection, and a light sensor for line following.
Manufacturing Feasibility:
Assessed the viability of using 3D-printed components for cost efficiency and customization.
Selected Carbon Fiber PLA for its lightweight yet durable properties, ensuring longevity in an educational setting.
The Maze Runner project stemmed from a high school culminating project to propose a versatile robotics project suitable for classroom kits. The research phase involved:
Identifying Capabilities:
Analyzed robotics projects suitable for educational purposes, focusing on features like maze solving, line following, and obstacle avoidance.
Ensured the project aligned with curriculum goals to teach programming, electronics, and mechanical design.
Component Selection:
Chose an Arduino UNO Rev3 for its wide accessibility and ease of programming.
Evaluated stepper motors for precision, ultrasonic sensors for obstacle detection, and a light sensor for line following.
Manufacturing Feasibility:
Assessed the viability of using 3D-printed components for cost efficiency and customization.
Selected Carbon Fiber PLA for its lightweight yet durable properties, ensuring longevity in an educational setting.
Research
The Maze Runner project stemmed from a high school culminating project to propose a versatile robotics project suitable for classroom kits. The research phase involved:
Identifying Capabilities:
Analyzed robotics projects suitable for educational purposes, focusing on features like maze solving, line following, and obstacle avoidance.
Ensured the project aligned with curriculum goals to teach programming, electronics, and mechanical design.
Component Selection:
Chose an Arduino UNO Rev3 for its wide accessibility and ease of programming.
Evaluated stepper motors for precision, ultrasonic sensors for obstacle detection, and a light sensor for line following.
Manufacturing Feasibility:
Assessed the viability of using 3D-printed components for cost efficiency and customization.
Selected Carbon Fiber PLA for its lightweight yet durable properties, ensuring longevity in an educational setting.
Design
Design
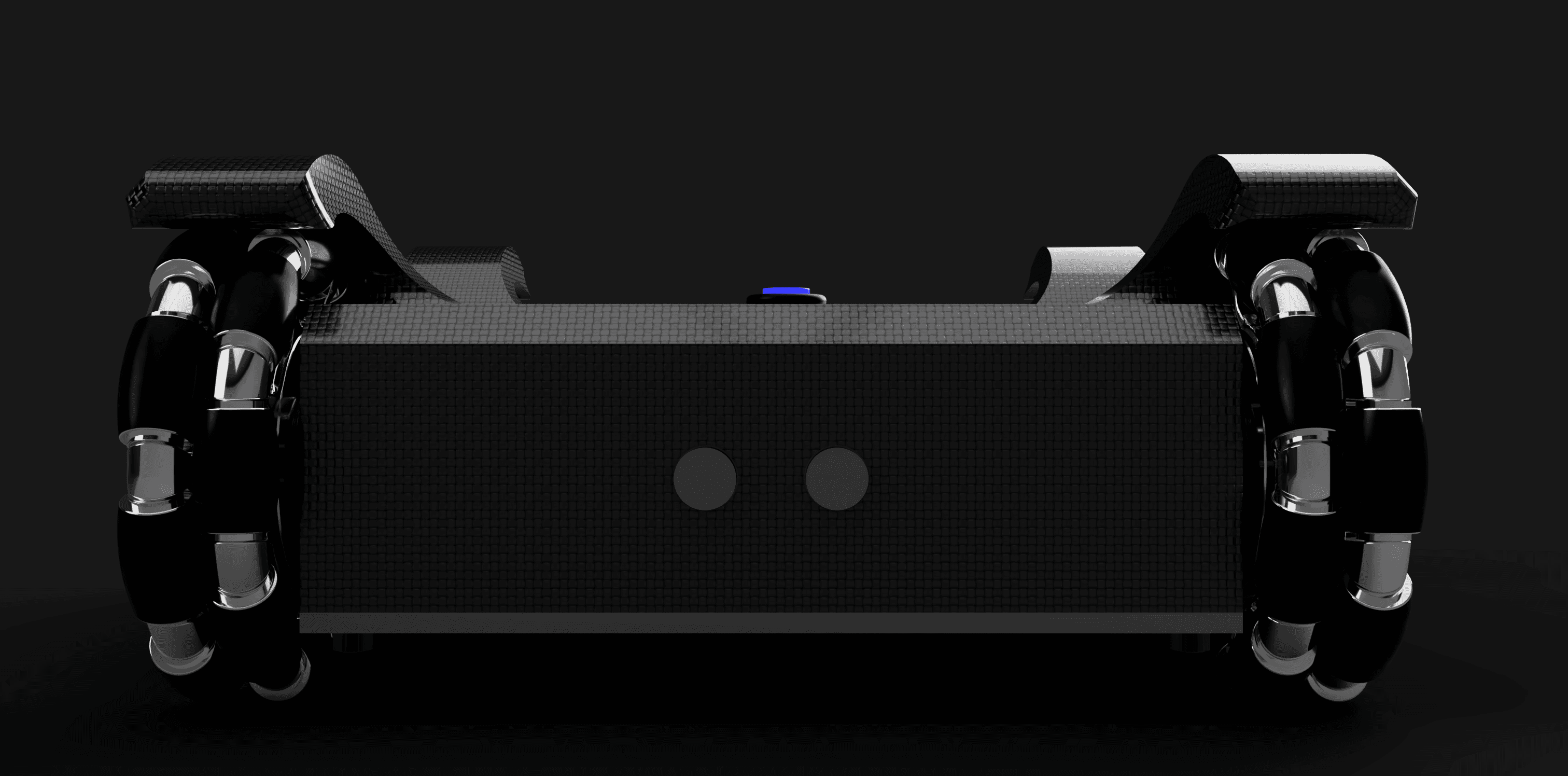
The Maze Runner was designed with modularity and robustness in mind, making it ideal for educational use. Key design elements included:
Mechanical Design:
Created a 3D-printed body and baseplate with slots for each component, ensuring secure assembly.
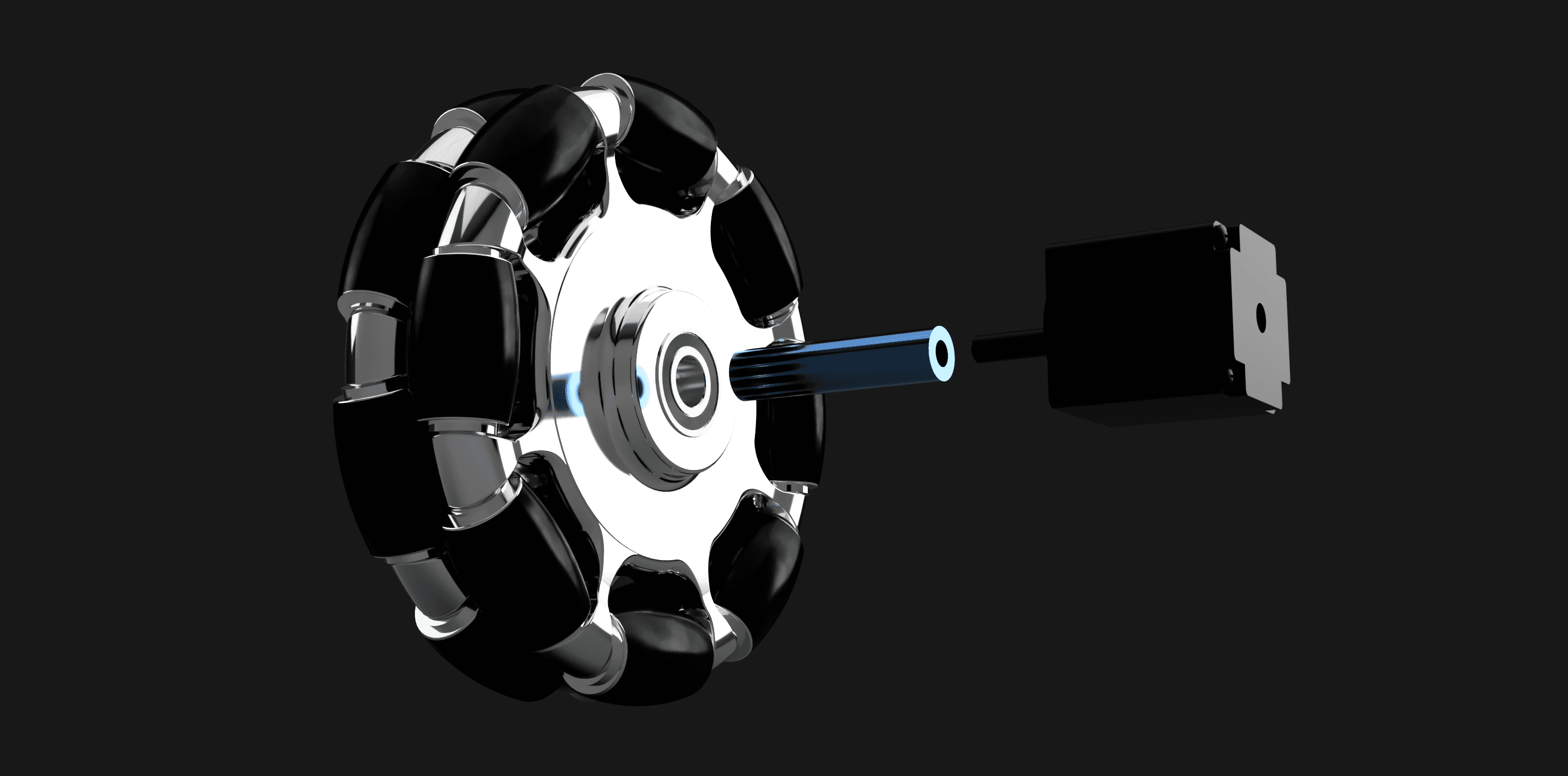
Incorporated omni-directional wheels for 360º movement, enhancing maneuverability in confined spaces.
Electrical Integration:
Designed the layout to house the Arduino, battery packs, and sensors efficiently, maintaining a low center of gravity.
Planned wiring routes for minimal interference and ease of troubleshooting.
Software Design:
Used the Arduino IDE for programming, enabling straightforward coding for students.
Included modular code blocks for maze-solving, line-following, and obstacle detection, allowing for incremental learning.
User Experience:
Focused on a step-by-step assembly process, making it easy for students to build and customize their robots.
Designed the housing with accessible slots for buttons and sensors to facilitate quick adjustments.
The Maze Runner was designed with modularity and robustness in mind, making it ideal for educational use. Key design elements included:
Mechanical Design:
Created a 3D-printed body and baseplate with slots for each component, ensuring secure assembly.
Incorporated omni-directional wheels for 360º movement, enhancing maneuverability in confined spaces.
Electrical Integration:
Designed the layout to house the Arduino, battery packs, and sensors efficiently, maintaining a low center of gravity.
Planned wiring routes for minimal interference and ease of troubleshooting.
Software Design:
Used the Arduino IDE for programming, enabling straightforward coding for students.
Included modular code blocks for maze-solving, line-following, and obstacle detection, allowing for incremental learning.
User Experience:
Focused on a step-by-step assembly process, making it easy for students to build and customize their robots.
Designed the housing with accessible slots for buttons and sensors to facilitate quick adjustments.
The Maze Runner was designed with modularity and robustness in mind, making it ideal for educational use. Key design elements included:
Mechanical Design:
Created a 3D-printed body and baseplate with slots for each component, ensuring secure assembly.
Incorporated omni-directional wheels for 360º movement, enhancing maneuverability in confined spaces.
Electrical Integration:
Designed the layout to house the Arduino, battery packs, and sensors efficiently, maintaining a low center of gravity.
Planned wiring routes for minimal interference and ease of troubleshooting.
Software Design:
Used the Arduino IDE for programming, enabling straightforward coding for students.
Included modular code blocks for maze-solving, line-following, and obstacle detection, allowing for incremental learning.
User Experience:
Focused on a step-by-step assembly process, making it easy for students to build and customize their robots.
Designed the housing with accessible slots for buttons and sensors to facilitate quick adjustments.
Design
The Maze Runner was designed with modularity and robustness in mind, making it ideal for educational use. Key design elements included:
Mechanical Design:
Created a 3D-printed body and baseplate with slots for each component, ensuring secure assembly.
Incorporated omni-directional wheels for 360º movement, enhancing maneuverability in confined spaces.
Electrical Integration:
Designed the layout to house the Arduino, battery packs, and sensors efficiently, maintaining a low center of gravity.
Planned wiring routes for minimal interference and ease of troubleshooting.
Software Design:
Used the Arduino IDE for programming, enabling straightforward coding for students.
Included modular code blocks for maze-solving, line-following, and obstacle detection, allowing for incremental learning.
User Experience:
Focused on a step-by-step assembly process, making it easy for students to build and customize their robots.
Designed the housing with accessible slots for buttons and sensors to facilitate quick adjustments.
Development
Development
Development included prototyping, assembly, and iterative testing to refine the design:
Prototyping:
Manufactured the body using a Prusa 3D printer with Carbon Fiber PLA.
Assembled a functional prototype to test the fit and durability of the components.
Testing:
Tested the stepper motors for smooth and precise movement under various loads.
Evaluated the ultrasonic sensors for accurate obstacle detection in all directions.
Verified the light sensor’s reliability in following paths under different lighting conditions.
Assembly:
Defined a clear step-by-step guide for assembling the robot, ensuring reproducibility in classroom settings.
Validated that all components fit seamlessly within the 3D-printed housing.
Development included prototyping, assembly, and iterative testing to refine the design:
Prototyping:
Manufactured the body using a Prusa 3D printer with Carbon Fiber PLA.
Assembled a functional prototype to test the fit and durability of the components.
Testing:
Tested the stepper motors for smooth and precise movement under various loads.
Evaluated the ultrasonic sensors for accurate obstacle detection in all directions.
Verified the light sensor’s reliability in following paths under different lighting conditions.
Assembly:
Defined a clear step-by-step guide for assembling the robot, ensuring reproducibility in classroom settings.
Validated that all components fit seamlessly within the 3D-printed housing.
Development included prototyping, assembly, and iterative testing to refine the design:
Prototyping:
Manufactured the body using a Prusa 3D printer with Carbon Fiber PLA.
Assembled a functional prototype to test the fit and durability of the components.
Testing:
Tested the stepper motors for smooth and precise movement under various loads.
Evaluated the ultrasonic sensors for accurate obstacle detection in all directions.
Verified the light sensor’s reliability in following paths under different lighting conditions.
Assembly:
Defined a clear step-by-step guide for assembling the robot, ensuring reproducibility in classroom settings.
Validated that all components fit seamlessly within the 3D-printed housing.
Development
Development included prototyping, assembly, and iterative testing to refine the design:
Prototyping:
Manufactured the body using a Prusa 3D printer with Carbon Fiber PLA.
Assembled a functional prototype to test the fit and durability of the components.
Testing:
Tested the stepper motors for smooth and precise movement under various loads.
Evaluated the ultrasonic sensors for accurate obstacle detection in all directions.
Verified the light sensor’s reliability in following paths under different lighting conditions.
Assembly:
Defined a clear step-by-step guide for assembling the robot, ensuring reproducibility in classroom settings.
Validated that all components fit seamlessly within the 3D-printed housing.

Concept
Concept
The Maze Runner robot is an educational tool that combines software, hardware, and mechanical design in a single project. Key highlights include:
Versatility:
Equipped to solve mazes, follow lines, and detect obstacles, offering diverse learning opportunities.
Precision and Durability:
Utilizes NEMA stepper motors for high-precision movement and a robust Carbon Fiber PLA body.
Ease of Use:
Features a modular design for easy assembly, repair, and customization.
Educational Value:
Introduces students to programming, robotics, and 3D printing, fostering hands-on STEM education.
The Maze Runner robot is an educational tool that combines software, hardware, and mechanical design in a single project. Key highlights include:
Versatility:
Equipped to solve mazes, follow lines, and detect obstacles, offering diverse learning opportunities.
Precision and Durability:
Utilizes NEMA stepper motors for high-precision movement and a robust Carbon Fiber PLA body.
Ease of Use:
Features a modular design for easy assembly, repair, and customization.
Educational Value:
Introduces students to programming, robotics, and 3D printing, fostering hands-on STEM education.
The Maze Runner robot is an educational tool that combines software, hardware, and mechanical design in a single project. Key highlights include:
Versatility:
Equipped to solve mazes, follow lines, and detect obstacles, offering diverse learning opportunities.
Precision and Durability:
Utilizes NEMA stepper motors for high-precision movement and a robust Carbon Fiber PLA body.
Ease of Use:
Features a modular design for easy assembly, repair, and customization.
Educational Value:
Introduces students to programming, robotics, and 3D printing, fostering hands-on STEM education.
Concept
The Maze Runner robot is an educational tool that combines software, hardware, and mechanical design in a single project. Key highlights include:
Versatility:
Equipped to solve mazes, follow lines, and detect obstacles, offering diverse learning opportunities.
Precision and Durability:
Utilizes NEMA stepper motors for high-precision movement and a robust Carbon Fiber PLA body.
Ease of Use:
Features a modular design for easy assembly, repair, and customization.
Educational Value:
Introduces students to programming, robotics, and 3D printing, fostering hands-on STEM education.

©2024 MANDRO DESIGN
GO BACK TO TOP
©2024 MANDRO DESIGN
GO BACK TO TOP