Uni-Turner
Uni-Turner
Research
Research
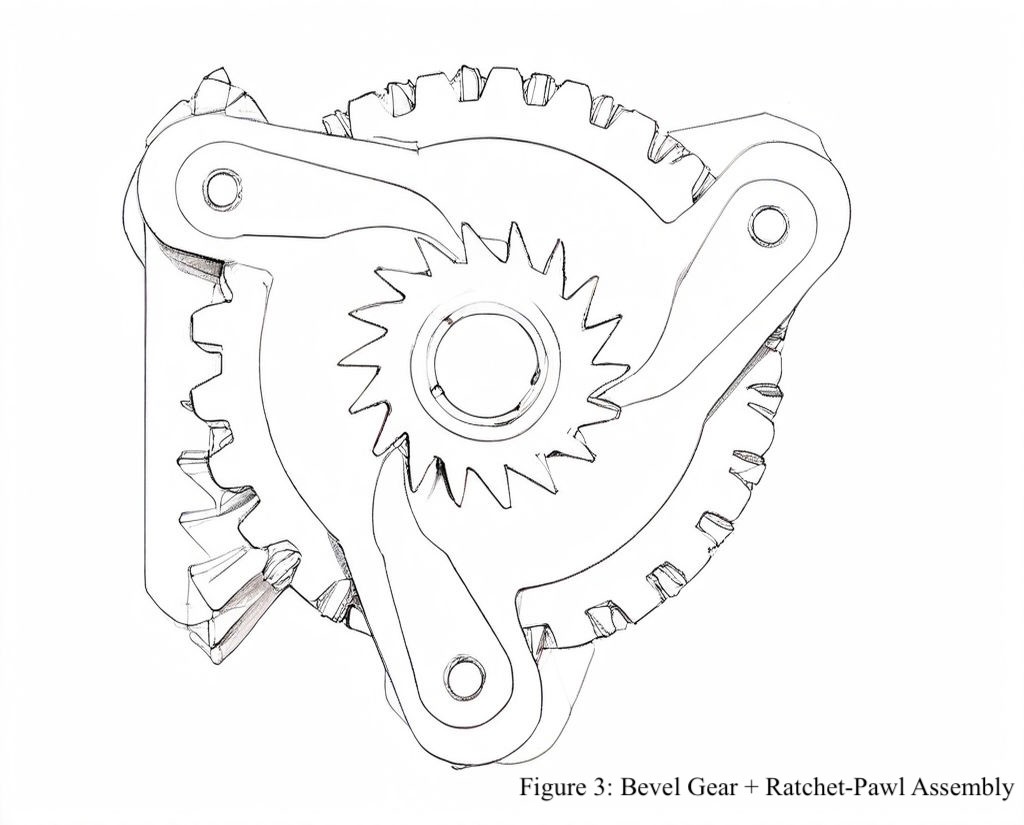
The Uni-Turner project revolved around reverse-engineering a mechanical system described in the book 507 Mechanical Movements. The research phase aimed to explore and enhance a traditional ratchet-pawl mechanism with modern CAD techniques and 3D printing. Key areas of focus included:
Understanding the Mechanism:
Studied the ratchet-pawl system described in the book to comprehend its functionality in converting two-way rotation into one-way rotation.
Analyzed limitations in the description, requiring innovative interpretation and reverse engineering.
Real-World Applications:
Investigated potential uses for such a mechanism, considering scenarios where continuous one-way motion from alternating input might be beneficial.
3D Printing Feasibility:
Explored material and tolerance considerations to ensure the design could be manufactured effectively using FDM 3D printing.
Design Challenges:
Identified the need for tight tolerances and simplified assembly to make the design practical and functional.
The Uni-Turner project revolved around reverse-engineering a mechanical system described in the book 507 Mechanical Movements. The research phase aimed to explore and enhance a traditional ratchet-pawl mechanism with modern CAD techniques and 3D printing. Key areas of focus included:
Understanding the Mechanism:
Studied the ratchet-pawl system described in the book to comprehend its functionality in converting two-way rotation into one-way rotation.
Analyzed limitations in the description, requiring innovative interpretation and reverse engineering.
Real-World Applications:
Investigated potential uses for such a mechanism, considering scenarios where continuous one-way motion from alternating input might be beneficial.
3D Printing Feasibility:
Explored material and tolerance considerations to ensure the design could be manufactured effectively using FDM 3D printing.
Design Challenges:
Identified the need for tight tolerances and simplified assembly to make the design practical and functional.
The Uni-Turner project revolved around reverse-engineering a mechanical system described in the book 507 Mechanical Movements. The research phase aimed to explore and enhance a traditional ratchet-pawl mechanism with modern CAD techniques and 3D printing. Key areas of focus included:
Understanding the Mechanism:
Studied the ratchet-pawl system described in the book to comprehend its functionality in converting two-way rotation into one-way rotation.
Analyzed limitations in the description, requiring innovative interpretation and reverse engineering.
Real-World Applications:
Investigated potential uses for such a mechanism, considering scenarios where continuous one-way motion from alternating input might be beneficial.
3D Printing Feasibility:
Explored material and tolerance considerations to ensure the design could be manufactured effectively using FDM 3D printing.
Design Challenges:
Identified the need for tight tolerances and simplified assembly to make the design practical and functional.
Research
The Uni-Turner project revolved around reverse-engineering a mechanical system described in the book 507 Mechanical Movements. The research phase aimed to explore and enhance a traditional ratchet-pawl mechanism with modern CAD techniques and 3D printing. Key areas of focus included:
Understanding the Mechanism:
Studied the ratchet-pawl system described in the book to comprehend its functionality in converting two-way rotation into one-way rotation.
Analyzed limitations in the description, requiring innovative interpretation and reverse engineering.
Real-World Applications:
Investigated potential uses for such a mechanism, considering scenarios where continuous one-way motion from alternating input might be beneficial.
3D Printing Feasibility:
Explored material and tolerance considerations to ensure the design could be manufactured effectively using FDM 3D printing.
Design Challenges:
Identified the need for tight tolerances and simplified assembly to make the design practical and functional.
Design
Design
The design phase transformed the research findings into a practical and innovative model:
Mechanical Functionality:
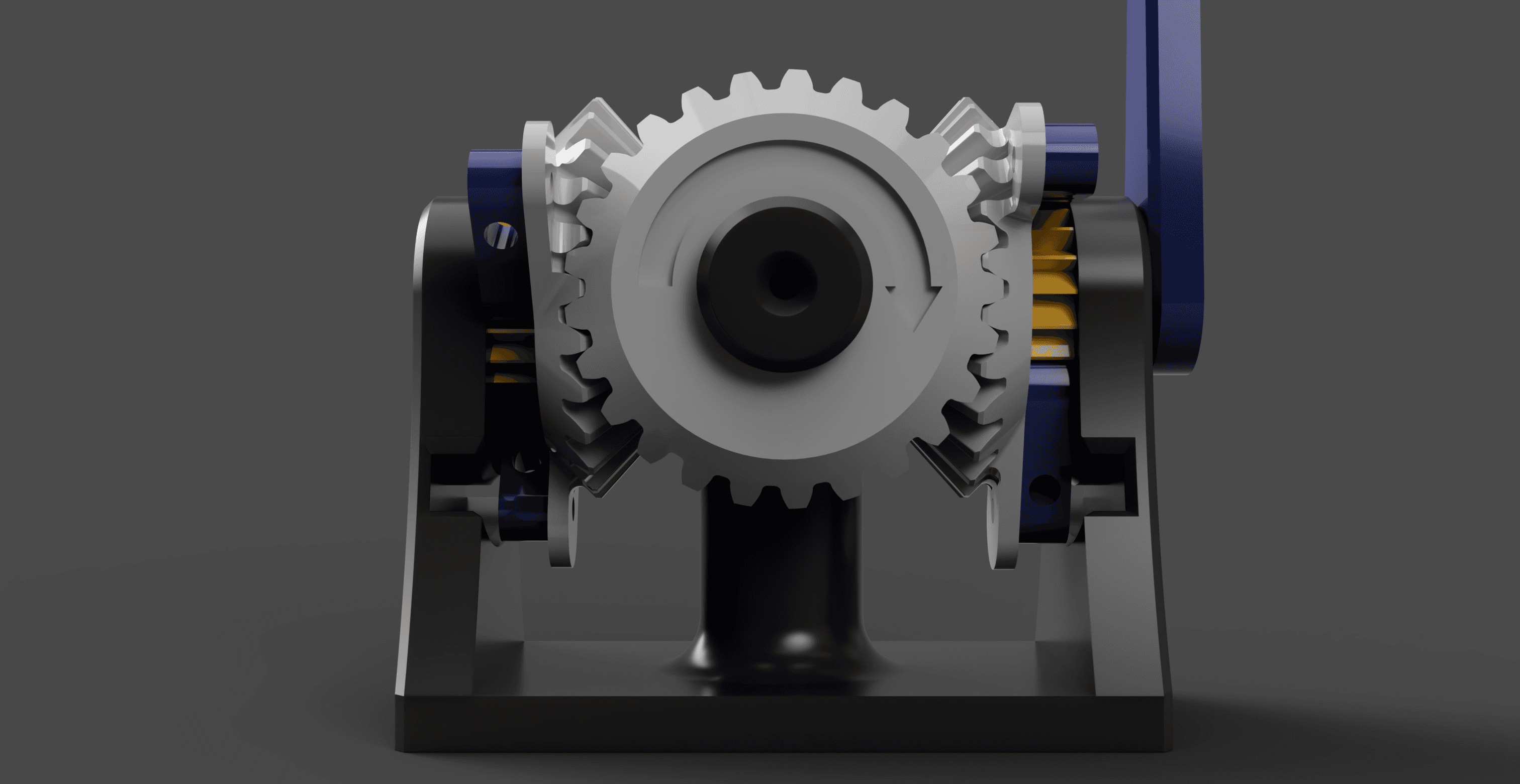
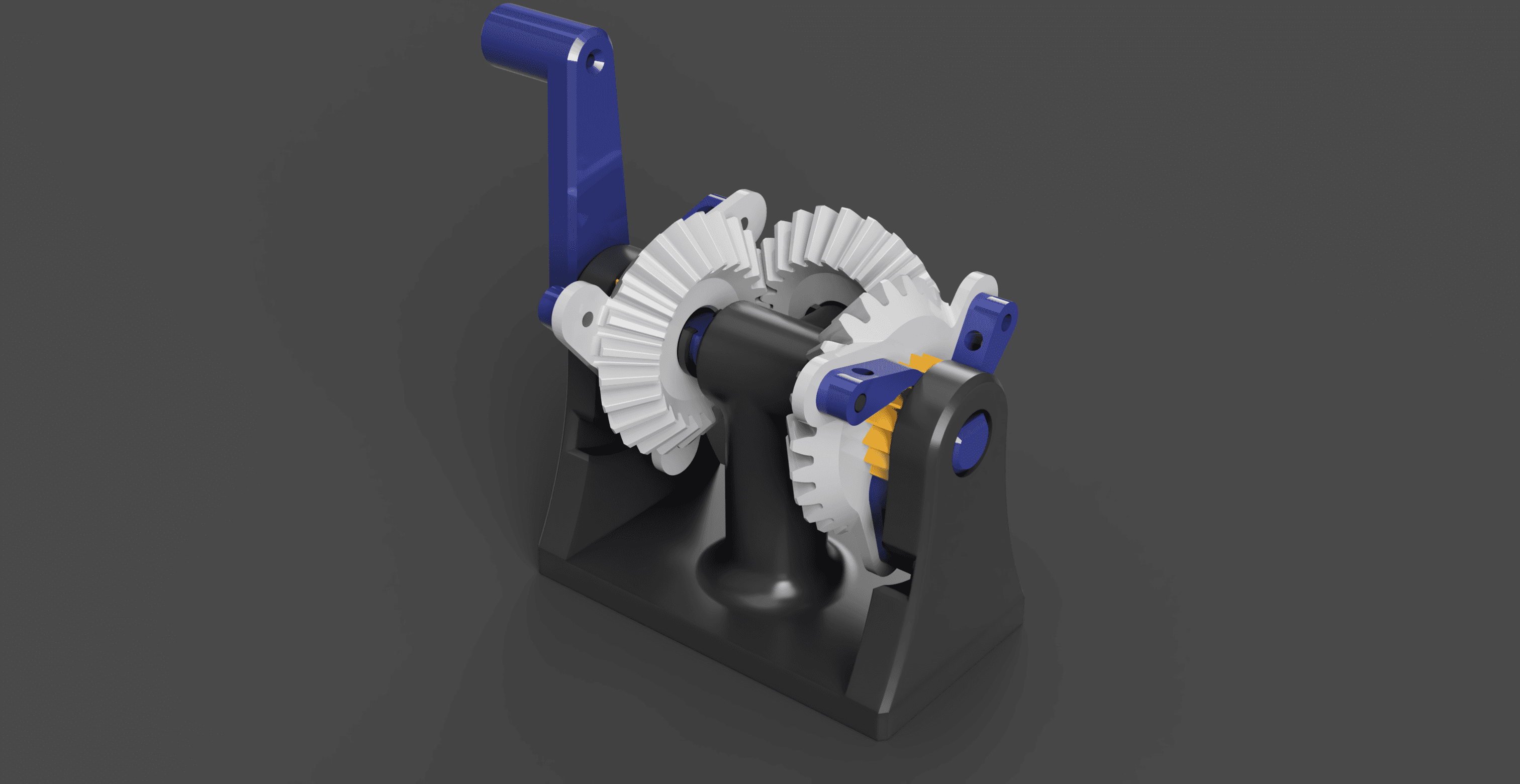
Created a system where mirrored ratchet-pawl assemblies allowed continuous rotation of a vertical shaft from alternating input.
Decoupled the ratchet and bevel gears to make the design more compatible with 3D printing.
Reverse Engineering Innovations:
Modified the original mechanism to eliminate unnecessary complexity, such as spring-loaded pawls that would complicate assembly.
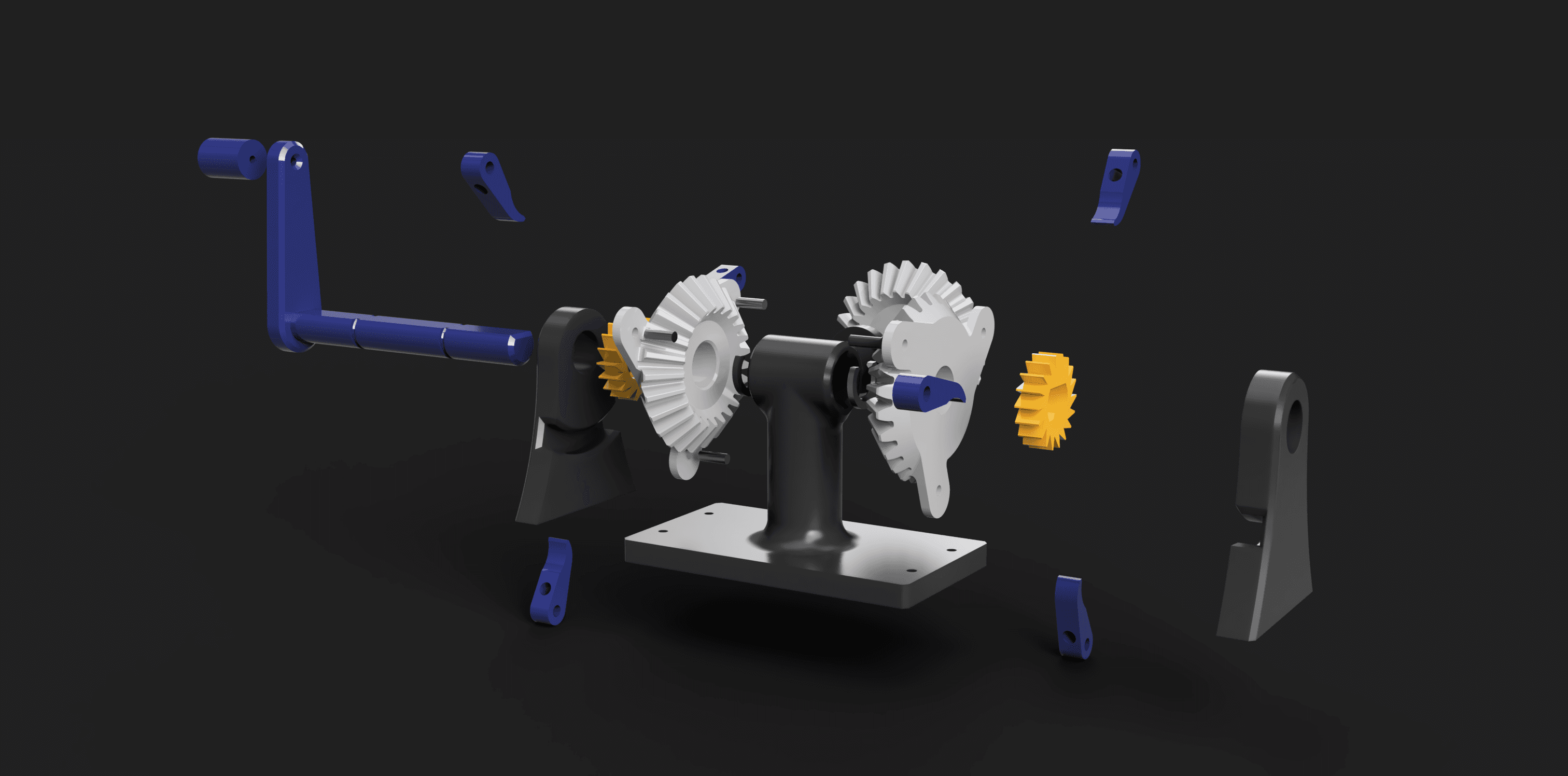
Redesigned the assembly to include bevel gears and ratchets as independent components, ensuring smooth operation and reliable engagement.
Prototyping Features:
Iteration sketches guided the design, focusing on how the parts fit together and function.
Integrated pins to secure pawls to bevel gears, prioritizing precise fit and functionality.
Future Enhancements:
Planned a print-in-place version of the design to eliminate assembly and streamline production.
The design phase transformed the research findings into a practical and innovative model:
Mechanical Functionality:
Created a system where mirrored ratchet-pawl assemblies allowed continuous rotation of a vertical shaft from alternating input.
Decoupled the ratchet and bevel gears to make the design more compatible with 3D printing.
Reverse Engineering Innovations:
Modified the original mechanism to eliminate unnecessary complexity, such as spring-loaded pawls that would complicate assembly.
Redesigned the assembly to include bevel gears and ratchets as independent components, ensuring smooth operation and reliable engagement.
Prototyping Features:
Iteration sketches guided the design, focusing on how the parts fit together and function.
Integrated pins to secure pawls to bevel gears, prioritizing precise fit and functionality.
Future Enhancements:
Planned a print-in-place version of the design to eliminate assembly and streamline production.
The design phase transformed the research findings into a practical and innovative model:
Mechanical Functionality:
Created a system where mirrored ratchet-pawl assemblies allowed continuous rotation of a vertical shaft from alternating input.
Decoupled the ratchet and bevel gears to make the design more compatible with 3D printing.
Reverse Engineering Innovations:
Modified the original mechanism to eliminate unnecessary complexity, such as spring-loaded pawls that would complicate assembly.
Redesigned the assembly to include bevel gears and ratchets as independent components, ensuring smooth operation and reliable engagement.
Prototyping Features:
Iteration sketches guided the design, focusing on how the parts fit together and function.
Integrated pins to secure pawls to bevel gears, prioritizing precise fit and functionality.
Future Enhancements:
Planned a print-in-place version of the design to eliminate assembly and streamline production.
Design
The design phase transformed the research findings into a practical and innovative model:
Mechanical Functionality:
Created a system where mirrored ratchet-pawl assemblies allowed continuous rotation of a vertical shaft from alternating input.
Decoupled the ratchet and bevel gears to make the design more compatible with 3D printing.
Reverse Engineering Innovations:
Modified the original mechanism to eliminate unnecessary complexity, such as spring-loaded pawls that would complicate assembly.
Redesigned the assembly to include bevel gears and ratchets as independent components, ensuring smooth operation and reliable engagement.
Prototyping Features:
Iteration sketches guided the design, focusing on how the parts fit together and function.
Integrated pins to secure pawls to bevel gears, prioritizing precise fit and functionality.
Future Enhancements:
Planned a print-in-place version of the design to eliminate assembly and streamline production.
Development
Development
The development phase focused on iterative refinement and prototyping to achieve a functional mechanism:
Prototyping:
3D printed the mechanism using PLA with careful attention to tolerances and part alignment.
Verified the first prototype was surprisingly precise, with all components fitting together effectively.
Testing and Refinement:
Evaluated the mechanism’s performance, ensuring the ratchet-pawl assemblies engaged and disengaged as expected.
Identified no significant mechanical flaws in the initial design but noted areas for improvement, such as exploring a print-in-place approach.
Reverse Engineering Success:
Achieved the desired functionality by altering the traditional design for better compatibility with modern manufacturing methods.
The development phase focused on iterative refinement and prototyping to achieve a functional mechanism:
Prototyping:
3D printed the mechanism using PLA with careful attention to tolerances and part alignment.
Verified the first prototype was surprisingly precise, with all components fitting together effectively.
Testing and Refinement:
Evaluated the mechanism’s performance, ensuring the ratchet-pawl assemblies engaged and disengaged as expected.
Identified no significant mechanical flaws in the initial design but noted areas for improvement, such as exploring a print-in-place approach.
Reverse Engineering Success:
Achieved the desired functionality by altering the traditional design for better compatibility with modern manufacturing methods.
The development phase focused on iterative refinement and prototyping to achieve a functional mechanism:
Prototyping:
3D printed the mechanism using PLA with careful attention to tolerances and part alignment.
Verified the first prototype was surprisingly precise, with all components fitting together effectively.
Testing and Refinement:
Evaluated the mechanism’s performance, ensuring the ratchet-pawl assemblies engaged and disengaged as expected.
Identified no significant mechanical flaws in the initial design but noted areas for improvement, such as exploring a print-in-place approach.
Reverse Engineering Success:
Achieved the desired functionality by altering the traditional design for better compatibility with modern manufacturing methods.
Development
The development phase focused on iterative refinement and prototyping to achieve a functional mechanism:
Prototyping:
3D printed the mechanism using PLA with careful attention to tolerances and part alignment.
Verified the first prototype was surprisingly precise, with all components fitting together effectively.
Testing and Refinement:
Evaluated the mechanism’s performance, ensuring the ratchet-pawl assemblies engaged and disengaged as expected.
Identified no significant mechanical flaws in the initial design but noted areas for improvement, such as exploring a print-in-place approach.
Reverse Engineering Success:
Achieved the desired functionality by altering the traditional design for better compatibility with modern manufacturing methods.
Concept
Concept
The Uni-Turner project demonstrates a successful blend of traditional mechanical systems with modern design and manufacturing techniques. Key highlights include:
Innovative Design:
A reimagined ratchet-pawl mechanism that maintains the core functionality while optimizing for 3D printing.
Precision Engineering:
Achieved tight tolerances and high functionality in the first prototype, showcasing the effectiveness of CAD and iterative design.
Future Potential:
The print-in-place iteration has the potential to revolutionize small mechanical assemblies by reducing the need for post-processing or additional components.
Educational Value:
Offers insight into reverse engineering, design for manufacturing, and mechanical optimization.
The Uni-Turner project demonstrates a successful blend of traditional mechanical systems with modern design and manufacturing techniques. Key highlights include:
Innovative Design:
A reimagined ratchet-pawl mechanism that maintains the core functionality while optimizing for 3D printing.
Precision Engineering:
Achieved tight tolerances and high functionality in the first prototype, showcasing the effectiveness of CAD and iterative design.
Future Potential:
The print-in-place iteration has the potential to revolutionize small mechanical assemblies by reducing the need for post-processing or additional components.
Educational Value:
Offers insight into reverse engineering, design for manufacturing, and mechanical optimization.
The Uni-Turner project demonstrates a successful blend of traditional mechanical systems with modern design and manufacturing techniques. Key highlights include:
Innovative Design:
A reimagined ratchet-pawl mechanism that maintains the core functionality while optimizing for 3D printing.
Precision Engineering:
Achieved tight tolerances and high functionality in the first prototype, showcasing the effectiveness of CAD and iterative design.
Future Potential:
The print-in-place iteration has the potential to revolutionize small mechanical assemblies by reducing the need for post-processing or additional components.
Educational Value:
Offers insight into reverse engineering, design for manufacturing, and mechanical optimization.
Concept
The Uni-Turner project demonstrates a successful blend of traditional mechanical systems with modern design and manufacturing techniques. Key highlights include:
Innovative Design:
A reimagined ratchet-pawl mechanism that maintains the core functionality while optimizing for 3D printing.
Precision Engineering:
Achieved tight tolerances and high functionality in the first prototype, showcasing the effectiveness of CAD and iterative design.
Future Potential:
The print-in-place iteration has the potential to revolutionize small mechanical assemblies by reducing the need for post-processing or additional components.
Educational Value:
Offers insight into reverse engineering, design for manufacturing, and mechanical optimization.
©2024 MANDRO DESIGN
GO BACK TO TOP
©2024 MANDRO DESIGN
GO BACK TO TOP